Table of Contents
This article describes how to use the PB-4 to balance the rotor of a gyroplane. The procedure described should be suitable for all two blade gyroplanes that are able to have the necessary adjustments carried out. The tutorial makes use of the online PB-4 simulator which simulates the vibration source and so you do not need a PB-4 (or even a gyroplane!) to learn about rotor balancing. For detailed information regarding the PB-4 hardware and User Interface software, please see the PB-4 manuals available to download at www.smartavionics.com/pb4/pb4.html.
Everyone is familiar with the idea of balancing an object so that it may rotate smoothly without wobbling. Every time we get a new tyre fitted to a car wheel, the technician will balance the wheel using a dynamic balancing machine which detects the vibration caused by the imbalance, does some calculations and then indicates where the small weights need to be added to the rim of the wheel to improve the balance. The tyre technician makes adjustments to the state of balance by adding and removing weights. They are fortunate in that there are normally no constraints as to where the weights can be added to the wheel rim. All 360° of the rim is available. By comparison, the typical gyroplane rotor only allows the balance of the rotor to be easily altered in two directions which we call spanwise and chordwise.
It may also be possible to adjust the pitch of the rotor blades. If one blade has more pitch than the other, the amount of lift/drag it produces will be different and this can produce vibration which should be reduced along with the vibration due to mass imbalance. Indeed, if the vibration due to blade pitch difference is not reduced, it may be difficult to obtain a really good mass balance. So we also discuss adjusting the rotor's pitch along with its mass balance. The process of adjusting the blade pitch so that the rotor tips fly at the same height is known as tracking and people often carry out tracking and balancing as two separate operations. With the PB-4, pitch change is just another adjustment (like changing the spanwise and chordwise balance) and so we can combine the two processes (tracking and balancing) into one and, for brevity, simply refer to the combined process as balancing.
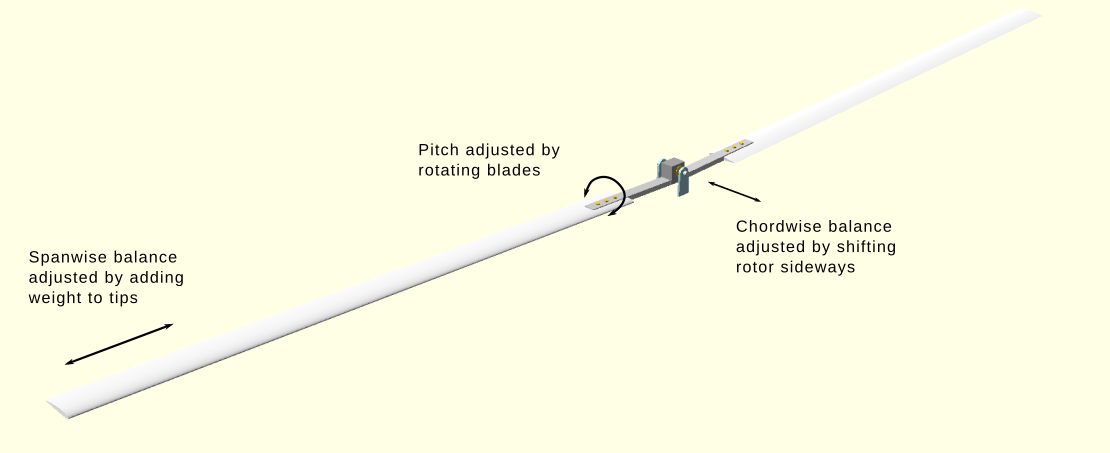
The balance in the spanwise direction (tip to tip) is commonly altered by adjusting the amount of weight that is attached to the tips of the rotor blades. One of the blades is arbitrarily designated as the master blade (the other is the slave blade). Our convention is that mass added to the master blade tip is positive and mass added to the slave blade is negative. So, for example, if we have 3 grams attached to the master blade tip and 1 gram attached to the slave blade tip, the net result is +2. If we had 3 grams on the master blade tip and 4 grams on the slave blade tip, the net result would be -1. How the weights are attached to the blade tips is gyroplane type specific. Some gyroplanes do not provide any means to attach weights to the blade tips. Those that have hollow (extruded) rotor blades may have mass added to the tips by inserting the mass at the open root end of the blades and it will find its way to the tip.
The balance in the chordwise direction (side to side) is commonly altered by shifting the whole rotor (blades and hub bar) left or right. Exactly how this is done is gyroplane type specific. Some machines require you to insert/remove shims, other machines provide some form of threaded adjuster. In all cases, the amount of movement required is quite small (fraction of a mm). Our convention is that a net positive value is a shift to the right (when the rotor is viewed from above with the master blade pointing forward) and a net negative value is a shift to the left.
The relative pitch of the blades is commonly altered by adding/removing shims where the hub bar are attached to the teeter block. Some rotors provide a rotating or threaded adjuster. The amount of pitch change required is normally very small. Our convention is that a positive pitch change increases the master blade pitch (which automatically decreases the slave blade pitch) and a negative pitch change decreases the master blade pitch along with a corresponding increase in the pitch of the slave blade.
The goal of the balancing procedure is to find the combination of spanwise balance, chordwise balance and blade pitch that minimises the measured level of vibration at the chosen rotor RPM.
The PB-4 software uses the following concepts to achieve that goal:
- Polar Points
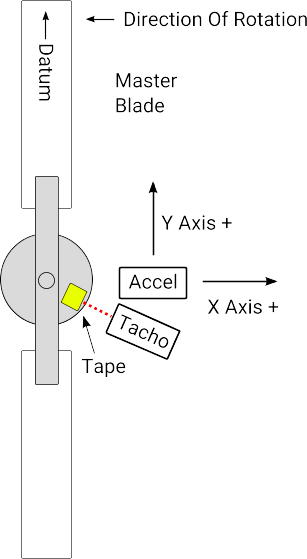
A polar point (or simply a point) is a measurement of the vibration state of the rotor at a particular moment in time. The vibration is measured by an accelerometer that is mounted near the top of the rotor mast that is orientated such that it is sensitive to vibration in the horizontal plane (parallel to the rotor disk). The point has the properties of magnitude and angle. The magnitude indicates how much vibration is present. Conventionally, it is expressed as a velocity. The PB-4 reports the magnitude in units of Inches Per Second (IPS). The point's angle is related to the position of the rotor at the moment the point was captured and is reported in degrees (0-359).
- Polar Chart
The polar chart is the spider web like display on which the polar points are plotted using their magnitude and angle values. The centre of the chart is zero IPS and if our rotor was perfectly balanced, the polar points captured would be plotted in the centre of the chart. The polar points will be plotted some distance from the centre of the chart when the rotor is unbalanced. The aim of the rotor balancing “game” is to move the polar points from wherever they are initially to as close as possible to the centre of the chart. This is done by altering the state of the rotor and capturing more points.
- Accelerometer Axes
In a simpler world it would be sufficient to measure the vibration in a single direction, or axis, parallel to the rotor disk. Unfortunately, due to the complex nature of real world gyroplane vibration characteristics, we need to measure the vibration using two axes if we wish to obtain the best results. The axes, which we always refer to as X and Y are at 90° to each other. Our convention is that the accelerometer is orientated such that the X axis points to the right when viewed from above and the Y axis points forward. The PB-4 will capture points from both axes simultaneously (and also the X2 and Y2 axes if the second accelerometer is present) and plot the points from any two axes on the polar chart.
- Profile
To ensure the PB-4 displays the polar points and move lines in a consistent fashion, it is desirable to be able to tell the PB-4 the orientation of the accelerometer axes. This is done through the use of a profile. A profile is simply a group of values that has been given a name. At this time, the only values in a profile are the directions of the accelerometer axes (measured in a clockwise direction when the rotor is viewed from above). Profiles for common brands of gyroplane are provided. See Section 3.3, “Rotor Mode Profiles” and also the PB-4 UI Manual for more details on profiles.
- Adjustments
An adjustment is something that you can alter that affects the state of the rotor. When the state of the rotor is altered and new polar points (X and Y) are captured, those points will move to new locations on the polar chart compared to the locations of the points that were captured before the adjustment was carried out. The PB-4 supports three adjustments called span, chord and pitch which correspond to the spanwise balance, chordwise balance and rotor pitch.
When a physical adjustment is made to the machine, i.e. weight is added to the master blade, the operator updates the appropriate PB-4 adjustment value, in this case span, so that the software can follow the change that has been made. The PB-4 software does not need to know the units used for the adjustment, just the magnitude. When each polar point is captured, the PB-4 remembers the current values of the adjustments at the time of capture. The adjustment values for each captured polar point are displayed in the polar point list.
- Move Lines
To be able to calculate the optimal values for the adjustments, the PB-4 needs to know the effects of those adjustments on the polar points. The exact procedure is covered in detail later but the basic idea is that over a short number of flights, the effects of single adjustments (mass added/removed, rotor shifted left/right, etc.) are measured (polar points are captured on each flight). Once the points have been captured for a particular set of changes to an adjustment, a move line can be created from those points. The move line relates the changes made to an adjustment to the subsequent movement of the polar points. For a given amount of adjustment, the PB-4 can determine from the move line the direction the points will move and also how far the points will move. Separate move lines are required for the X and Y axes.
- Balance Solution
Once move lines have been defined for all of the adjustments being used, the software can calculate a balance solution which is the combination of adjustment values that will move the X and Y polar points closest to the centre of the chart. To summarise: while you are going through the process of making adjustments and capturing points, you are keeping the PB-4 informed as to the current values of those adjustments. After all the required points have been captured and the move lines have been defined, the PB-4 can then tell you the balance solution in terms of those same adjustments.
The more adjustments you use, the more likely it is that a good result is obtained. So if you tried to balance using just the spanwise balance adjustment you may be able to improve the state of the rotor but it's not guaranteed that a good result is achievable. Using both spanwise and chordwise adjustments will greatly improve the chance of a good result and including pitch adjustment as well should be better still.
The PB-4 Viewer & Simulator is an online resource that lets you view previously saved PB-4 job data (polar points, spectra, move lines). The simulation capability generates polar points without needing a PB-4 or any sensors or even a real vibration source and provides an ideal training environment for practising propeller or rotor balancing. At the moment, the simulator is limited to the X and Y axes only and it does not produce spectra or waveform data, just basic polar points.
The simulated polar points are “perfect” in that for a given balance condition and environment they do not vary like real polar points do. Furthermore, the simulation is quite simplistic in its modelling of the effects of adjustments on the position of polar points and so will always produce a reasonable result if the adjustments are set appropriately. Unfortunately, real life gyroplane rotor physics is a lot more complicated and it cannot be guaranteed that the PB-4 will always be able to determine a reasonable result. So the intended purpose of the simulator is to give people a means of practising the balancing procedure rather than providing a totally realistic simulation of rotor physics.
Start a modern web browser (e.g. Firefox, Chrome, Safari) and load the viewer/simulator from www.smartavionics.com/pb4/viewer/viewer.html. After the page has loaded and the splash screen has gone you should see a page like this.
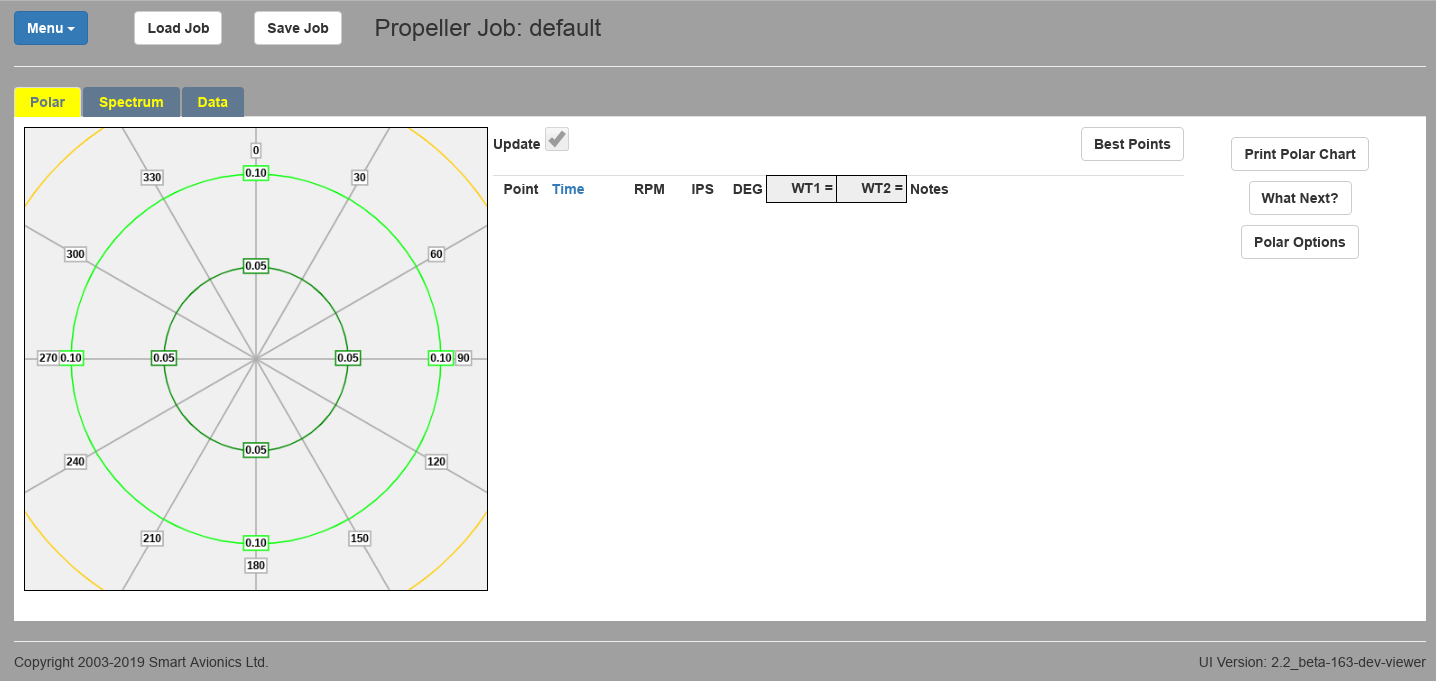
By default, the job name is “default” and the job is set to propeller mode. First thing you must do is click on Polar Options and change the Polar Mode to Rotor. Do that now and see that the page changes to this:
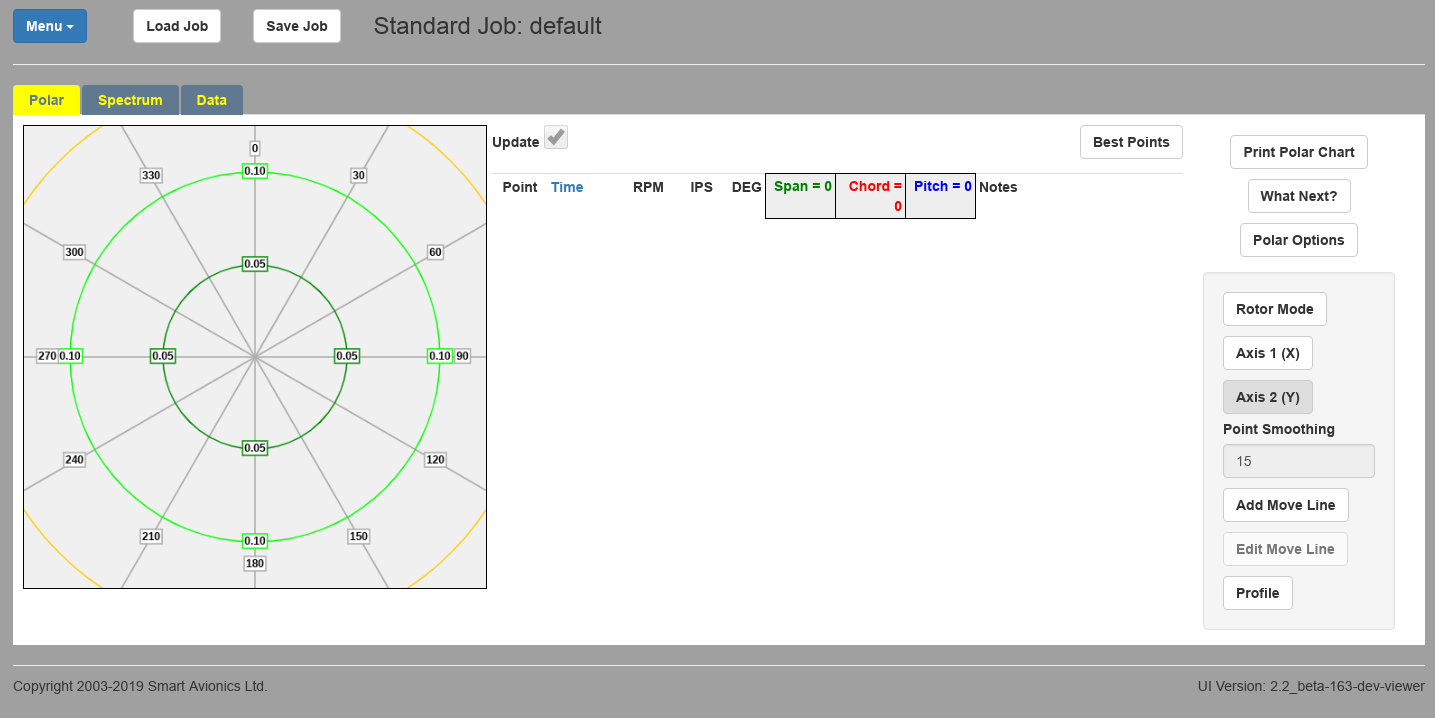
The polar points list is initially empty apart from the header row. Note the three distinctive header row items Span, Chord and Pitch. If you want to change the job name from “default”, just click on it and edit the name.
When using the simulator it is recommended to set the point visibility to Visible so that all the points we capture are visible. Do this now using the point visibility menu above the points list.
When doing a real balance it is recommended to only display the best points as this reduces the complexity of the points list and screen.
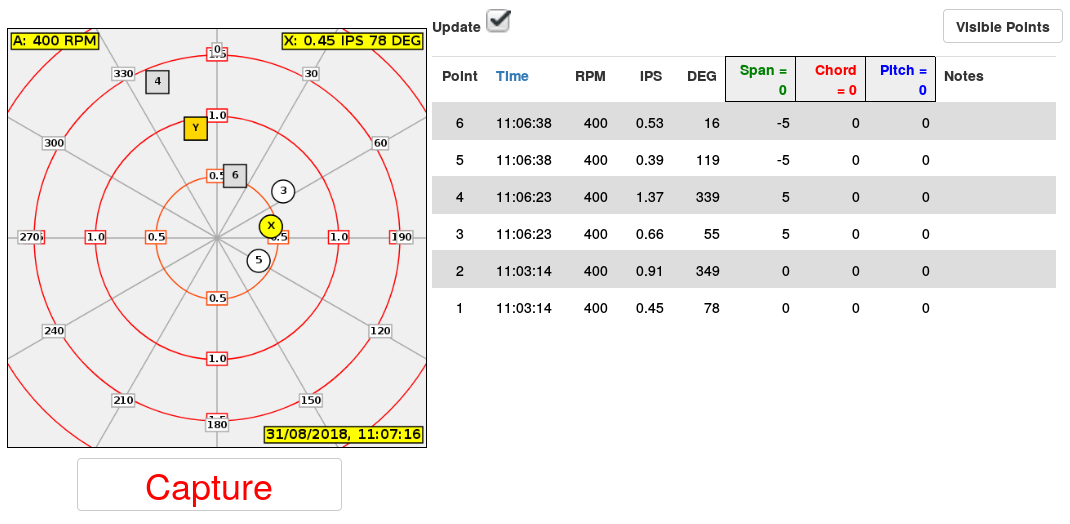
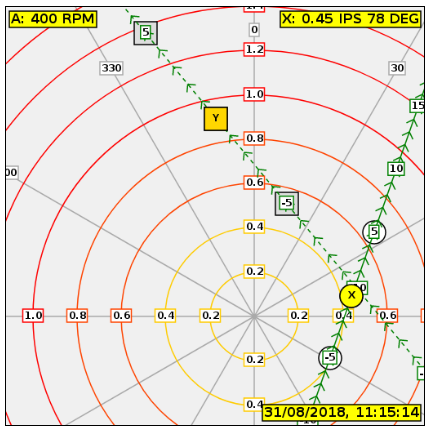
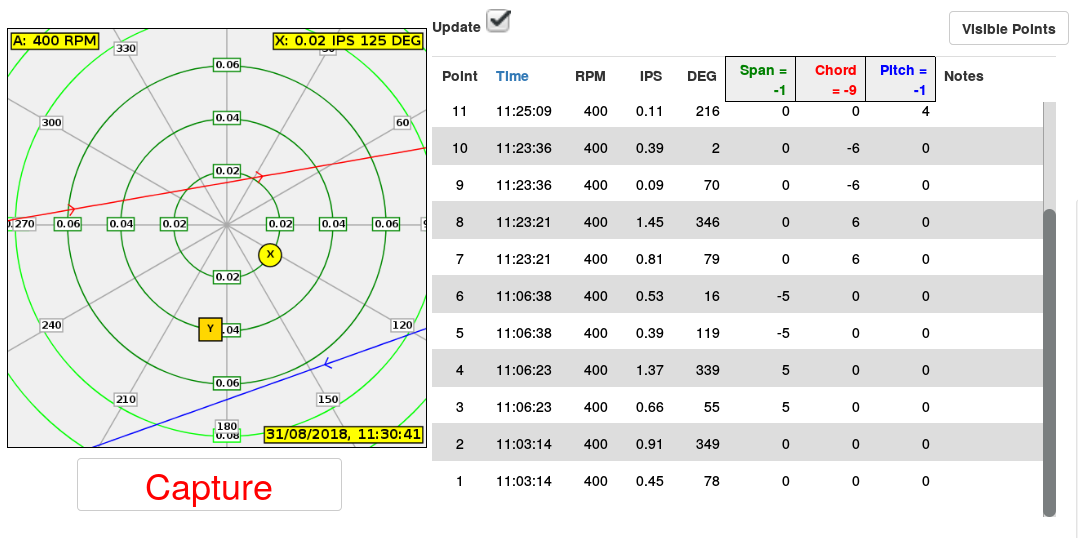
Now we can start the simulator which is done via the main menu (top left of page). Choose Simulate (0.45 IPS @ 78°). This always simulates those particular IPS/Deg values. It's also possible to simulate a random IPS/Deg combination. The polar chart should now be displaying “live” polar points with the X point on 0.45 IPS @ 78° and the Y point at a different location (different IPS and Deg). It should look like the following.
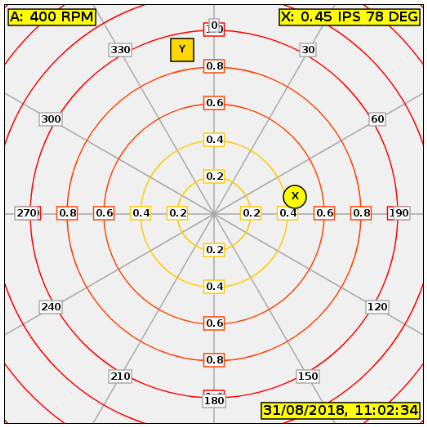
Note how the RPM is constant at 400 (a typical rotor RPM) and the time should be incrementing. The points are static because the simulation does not deliberately vary the polar point values (or the RPM). Obviously, when balancing a real rotor, the positions of the polar points will be varying along with the RPM and will move about due to pilot input, turbulence, etc but should remain in the same general area of the chart.
Note
You can save the current state of the simulation at any time using the Save Job button. Later you can reload it using the Load Job button. Reloading the web page always resets the viewer/simulator to the default initial state (propeller mode, no profile, X axis only).
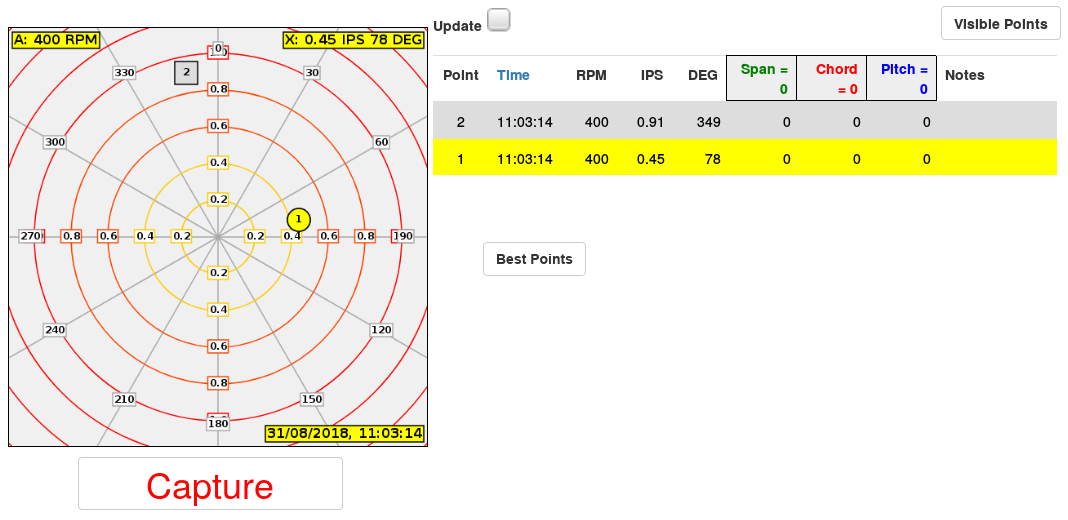
Capturing points is easy, just click on the large Capture button below the polar chart. If the button is disabled it means that the simulation is not running (it can be stopped and started from the main menu). Press the capture button and you will see a pair of X and Y points added to the polar point list and plotted on the chart. By default, the most recently captured point is at the top of the list. When you click on a row in the list, that point is highlighted in the list and on the polar chart and the yellow info boxes in the corners of the polar chart show the values from the selected point. Clicking on the highlighted row again will open a dialog that shows the point's details (more on that topic later).
While a point is selected in the list, the chart is not being updated. Chart update is controlled by the Update checkbox just above and to the right of the polar chart which is cleared when a polar point is selected in the list. Just click the Update checkbox to re-enable chart updates.
With the initial condition of our rotor captured, we can explore the effect of making adjustments. Because this is a simulator and not a real gyroplane we just enter the adjustment into the browser rather than physically making some change to the rotor state. Let's start by altering the spanwise balance. To do that, first ensure the Update checkbox is checked (so we can see the immediate effect of the adjustment) and then click on the Span column header. A dialog will open with a number input field which shows the current adjustment value. Using the little field up/down buttons you can alter the adjustment value and as you do so you should see the polar points move from their initial positions. You can also type a number into that field to make larger adjustments. When you close the dialog, the adjustment value stays at whatever you last changed it to. The current adjustment values are displayed in the polar point list header.
A few fairly obvious things to note about the effect of the adjustments are:
The larger the adjustment, the further the points move from their initial positions.
Positive adjustment values move the points in a particular direction, negative adjustment values move the points in the opposite direction.
A single adjustment value alters the position of both X and Y points, you do not have separate adjustment values for each axis.
The X and Y points do not have to move the same distance for the same adjustment change.
The X and Y points move in a straight line.
The chord and pitch adjustments are altered in exactly the same way as span, click on the respective column header and enter the desired value. The span, chord and pitch adjustments have different scaling so the magnitude of the adjustments you make will vary. For example, the spanwise balance could require 5 units of adjustment to move the polar points an appreciable distance but the chordwise balance (or pitch) adjustment required to move the polar points a similar distance could be a much smaller value, say, 2.
Note
It's worth emphasising that when you are balancing a real rotor, the adjustment values you enter are recording the changes you have made to the state of the rotor before each test flight. When using the simulator, entering those values actually has the effect of changing the positions of the simulated polar points.
Now you have seen the effect of making adjustments it's time to get down to work and systematically obtain the data (polar points) required to carry out the balance. So for each adjustment that you are going to use you must capture points with that adjustment set to two different values that are sufficiently different so that the polar points move a reasonable distance on the polar chart. What is a reasonable distance? Something like 1/4 or a 1/2 of the distance from the initial polar point positions to the centre of the chart would be fine. It's not really too critical.
So for the span adjustment, first set that to a positive value (e.g. 5 which equates to 5 weight units on the master blade tip) and capture a point. Then set the span adjustment to a negative value (e.g. -5 which equates to 5 weight units on the slave blade tip, having also removed the weight from the master blade) and capture another point. Finally, set the span adjustment back to zero (all tip weights removed). You should now have something like the following.
Note that the span adjustment value has been set back to zero. It's important to do that so that when you go on to alter the other adjustments the span adjustment does not have any effect. So for a real rotor balance you would need to restore the rotor back to it's initial state (i.e. remove the tip weights before going on to alter the chordwise balance or pitch).
If you have captured more points than the minimum required, it doesn't matter, the extra points can be ignored (and even hidden if they are distracting you). The points you capture when balancing a real rotor will tend to vary slightly so it is a good idea to capture a few so that you can be confident that you are getting consistent results.
To keep the polar chart as uncluttered as possible for the moment, we will next define the span move lines rather than capturing the points required for the chordwise balance and pitch adjustments (we can capture those later).
A move line is defined by specifying the positions of two nodes on the chart. Conceptually, the move line passes through both nodes and extends to infinity in both the positive and negative directions. The move line should also pass through the initial point. On the chart, the move lines are not drawn extending to infinity but they are sufficiently long for you to get an idea of their direction. Each node is assigned the adjustment value that was in use at the time the polar point that defines the node's position was captured. That sounds complicated but you will see that defining the positions and values of the move line nodes is actually very straightforward.
We need to create X and Y move lines based on the spanwise balance adjustment. It's easy! Click on Add Move Line and it will pop up a menu of possible move lines. Select X Span and this dialog box will open.
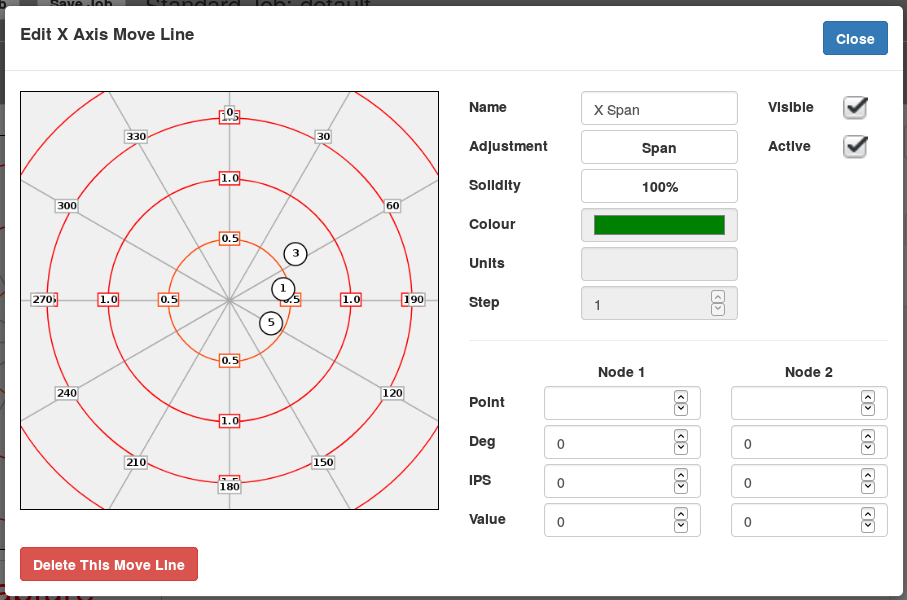
To define the move line you must enter the details for the move line's two nodes and the simplest way of doing that is to enter the polar point numbers (row numbers in the polar point list) for the appropriate points. In this case it is points 3 and 5. So enter those values into the Point fields for Node 1 and Node 2. The dialog should now look like this.
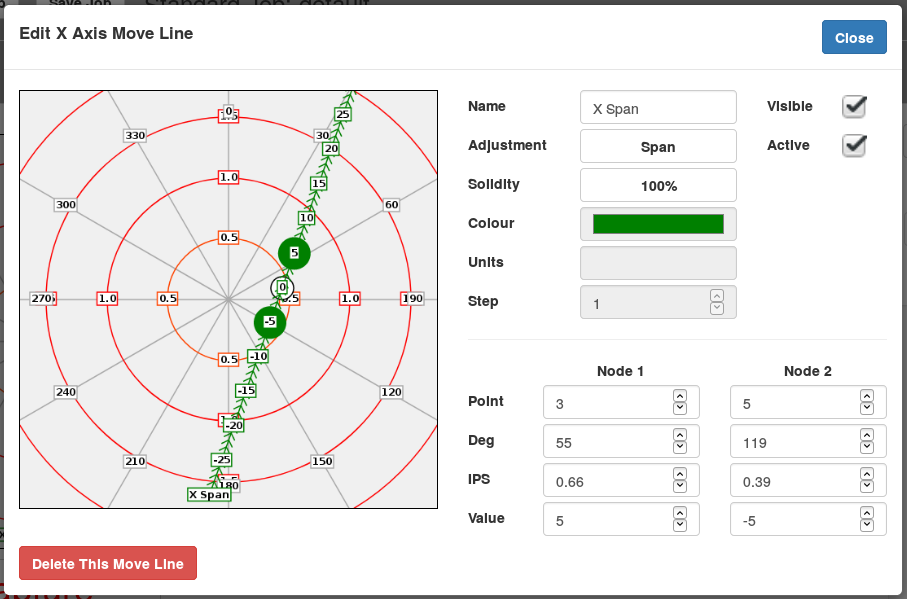
Note how the Deg, IPS and Value fields are all automatically filled in when you enter the Point index. Those values are taken from the specified point. Also note how the move line has now been drawn on the chart. You can see that the nodes are drawn as filled circles and inside the circles are the node's values. Along the move line are further little boxes showing the adjustment value that would be required to move a point that far along the line. Arrow heads indicate the direction of the move line which is the direction a point will move when the adjustment value becomes more positive. Close the dialog.
Note that if you ever want to change something about a move line, just click on Edit Move Line and choose the move line you wish to alter and the edit move line dialog will appear.
We can now repeat the process for the Y Span move line. For this move line you need to enter the polar point list row numbers for the Y points which will be 1 more than the corresponding X points. In our example the X axis points were numbers 3 and 5 and so the Y axis points are going to be 4 and 6. Do that and when the dialog is closed the resulting polar chart should look like this.
The X axis move line is solid and the Y axis move line is dashed.
Just to remind you what we have here. The move lines show us the directions and distances that the initial X and Y polar points will move on the chart when the spanwise balance is altered. So as we add weight to the master blade we can see that the X point will move in a roughly NNE direction and the Y point will move in a roughly NW direction.
Now that you have seen all the steps required to create the span move lines, repeat the process for the chord and pitch adjustments. The steps are: make an adjustment, capture points, make the opposite adjustment, capture points, restore rotor to its initial condition and, finally, define the X and Y move lines using the points you have just captured. The amounts used for the chord and pitch adjustments are not the same as used for the span adjustment. You will have to experiment to find appropriate values.
When you have added the chord and pitch move lines your chart should look like this.
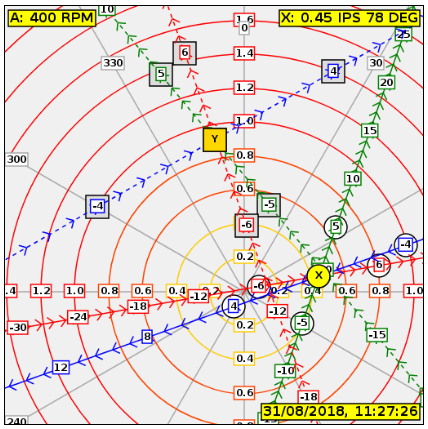
Notice how the various move lines differ in their relationships. The X and Y chord (red) move lines are almost at right angles to each other, the X and Y span (green) move lines are not quite so orthogonal and the X and Y pitch (blue) move lines are almost parallel to each other and pointing in different directions. What a mess! The simulation is based on real data so these move lines are quite typical of the move lines you will see when balancing a real rotor.
Remembering that the goal of the rotor balancing “game” is to get the X and Y polar points as close as possible to the centre of chart we need to determine the combination of adjustments that will yield the best result. You could attempt to do this by trial and error but, fortunately, the PB-4 software helps us there by calculating a solution based on the move lines we have defined. So to see the solution, select a polar point that was captured without any adjustments in place (i.e. one of the initial points) and select the yellow highlighted row again so that the point details dialog appears looking like this.
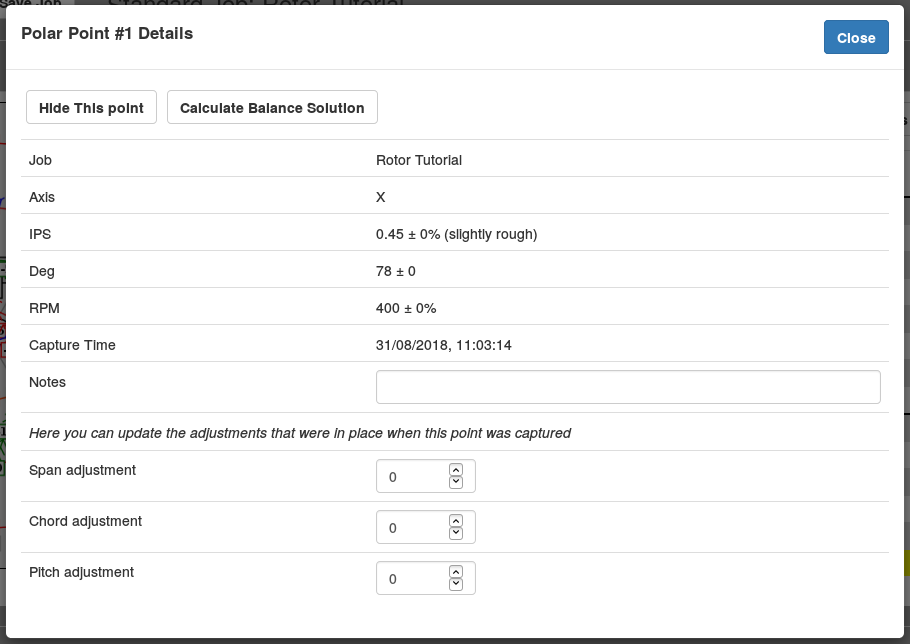
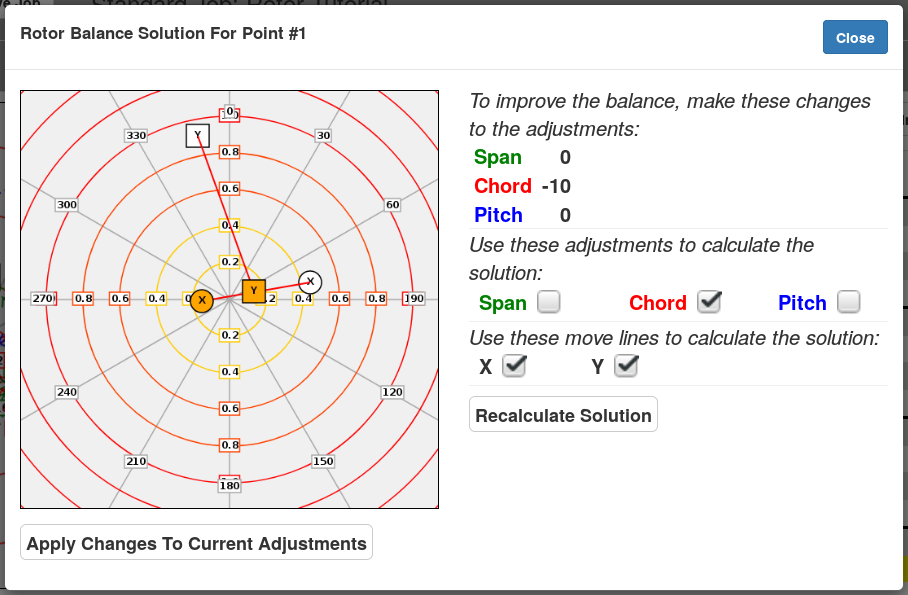
As expected, the dialog shows the point's details. It also provides number entry fields that let you change the adjustment values for that point. These are provided because although the recommended procedure is to enter the current adjustment by clicking on the box in the polar point list header row before you go fly and capture the points, if you forget to do that or enter the wrong value by mistake it's nice to have a means of retrospectively altering the adjustment values assigned to the point. But what we are interested in right now is the Calculate Balance Solution button. Click it and the dialog is replaced with another that tells you it's working on the solution and a few seconds later the solution will be displayed.
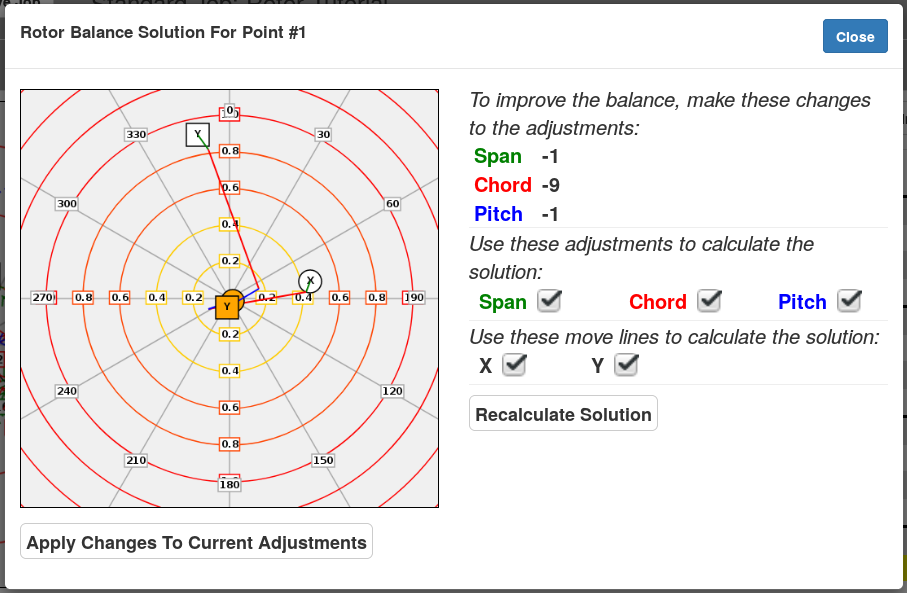
The solution is telling you the changes you have to make to the state of the rotor compared to the state at the time that point was captured. The changes are relative values not absolute. In words, it is saying reduce the weight on the master blade by 1 unit (or add 1 unit to the slave blade), reduce the chord adjustment by 9 units and reduce the pitch adjustment by 1 unit.
The polar chart shows the initial positions of the points in white and the calculated final positions of the points in orange. The effects of the suggested adjustments are shown as coloured lines.
There are checkboxes provided to select which adjustments and move lines are used when calculating the solution. You must have at least one adjustment and one move line enabled to be able to calculate a solution. Click the Recalculate Solution button to get a new solution after you have altered the selected adjustments or move lines.
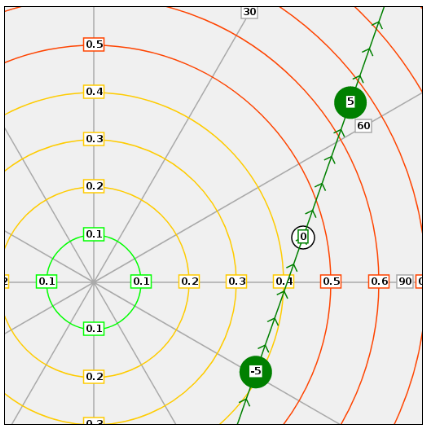
The button at the bottom, Apply Changes To Current Adjustments does exactly that, it updates the current adjustments with the calculated changes. The simulated points should now move closer to the centre of the chart and it now looks like this (after zooming into chart).
Note how the solution adjustment values are now being displayed at the top of the polar point list and the X and Y points are quite close to the centre of the chart. Job done!
The simulation should always produce a good balance given suitable values for the adjustments. The quality of balance you can achieve on a real gyroplane rotor depends on many factors. Here are some factors that will have an influence (listed in no particular order):
Polar point inaccuracies due to variation in conditions (sub-optimal location/fastening of sensors, pilot flying technique, environmental factors, variations in airspeed, rotor RPM, G loading, blade cleanliness, etc.)
Incorrect move line definitions (wrong points selected, wrong adjustment values, node points too close together, etc.)
Adjustments not applied accurately to gyroplane rotor (incorrect weight amounts and/or positions, incorrect shims, etc.)
Move lines not representative of real life behaviour. The software simplistically assumes that the move lines are straight lines (rather than curves) and that they are independent of each other. In reality, the move lines are not necessarily completely straight and there may be interaction between the adjustments.
Adjustments are too “coarse grained”. The adjustments have a setting called step which is the increment used when changing an adjustment's value and also it is used when calculating the solution. So if the step for, say, span is set to 1, the software will assume that only whole numbers of weight (grams, washers, etc.) can be used and this will limit the resolution of the solution. See the next section for details about step and the other adjustment settings.
The solution dialog described above contains checkboxes that you can use to disable one (or two) of the adjustments when calculating the solution. This can be useful because some adjustments may be easier to apply to the rotor than others so if an acceptable solution can be found that uses fewer adjustments it makes the job easier. Here's an example that shows the solution based only on a chord adjustment. In this case the calculated result is not nearly as good as when using all three adjustments but it's still a lot better than the initial condition.
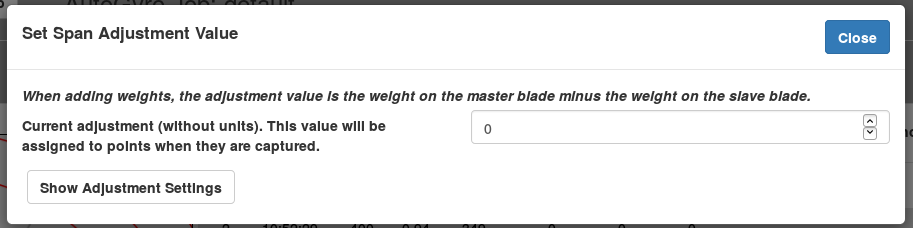
The three inbuilt adjustments (span, chord and pitch) are defined with sensible default settings. You may, however, alter these settings if you wish. To do so, click on the appropriate adjustment in the polar point list header and in the dialog that pops up, click Show Adjustment Settings. The dialog expands to show the settings.
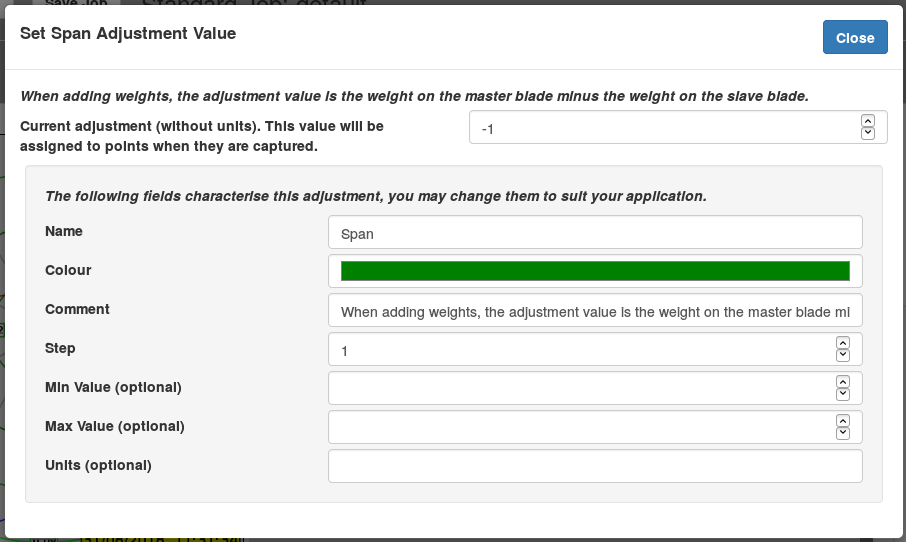
The adjustment's settings are:
- Name
Defaults to Span, Chord or Pitch. You can change it as required.
- Colour
The colour used in the polar point list header row and also for the move lines that are associated with this setting.
- Comment
This is the text that appears at the top of the dialog. It should remind the user what effect this particular adjustment has.
- Step
The adjustment value is incremented/decremented by this amount when input field arrows are clicked. Also, this sets the granularity of the result. It should be set appropriately considering the nature of the physical adjustment that is to be used. Very small steps will increase the time taken to calculate the result.
- Min Value, Max Value
These optional values specify lower and upper limits for the adjustment. The balance solution will be constrained to not use a value beyond the limits. By default, no constraints are placed on the solution values so it is possible for a solution to be calculated that is not physically possible to implement. For example, it could ask for 3 units of chordwise balance adjustment but the rotor mechanism only provides, say, +/- 2 units of adjustment. In that case, the adjustment value should be limited to +/- 2 and the resulting solution will be constrained to 2. In that situation, the calculated balance solution will not be optimal.
- Units
This optional value is simply a string that specifies the units for the adjustment (gm, mm, °, washers, etc.) The units are not used in any calculation and can be anything.
For the simulated rotor balance it's not essential to set the profile but when you go on to do real rotor balancing jobs you should set the profile appropriately so that the results you get for similar machines are comparable. In this tutorial we used the default Standard profile but we could have chosen any of the known profiles in the Profile menu.
All of the profiles except None specify that the accelerometer axes are orientated as shown in this diagram of the rotor viewed from above. The X axis is pointing to the right and the Y axis is pointing forward. Our convention is that the datum position of the rotor corresponds to when the master blade is pointing forward.